| Version 2 (modified by mark1, 14 years ago) (diff) |
|---|
Post Processing LiDAR Point Clouds
The usual form of delivery of the processed LiDAR data is in the form of a point cloud. This takes one of two forms; [link ASCII text files] or binary LAS files. The point clouds contain all the LiDAR data as vectors, a list of individual points, rather than as rasterised data.
Removing Noise Points
As part of the standard processing and quality checking of the LiDAR point clouds, ARSF-DAN classify 'noisy' points. This is done both by using automatic algorithms and by viewing the data. The noisy points can be one of the following:
- isolated points
- isolated clusters of points
- water induced noise
- cloud noise
- system noise
When a point has been identified as being 'noise' it is given a classification value of '7'. All other points will probably have classification of '0' (unclassified) or '1' (default). The classification values used follow the ASPRS standard LiDAR point classes.
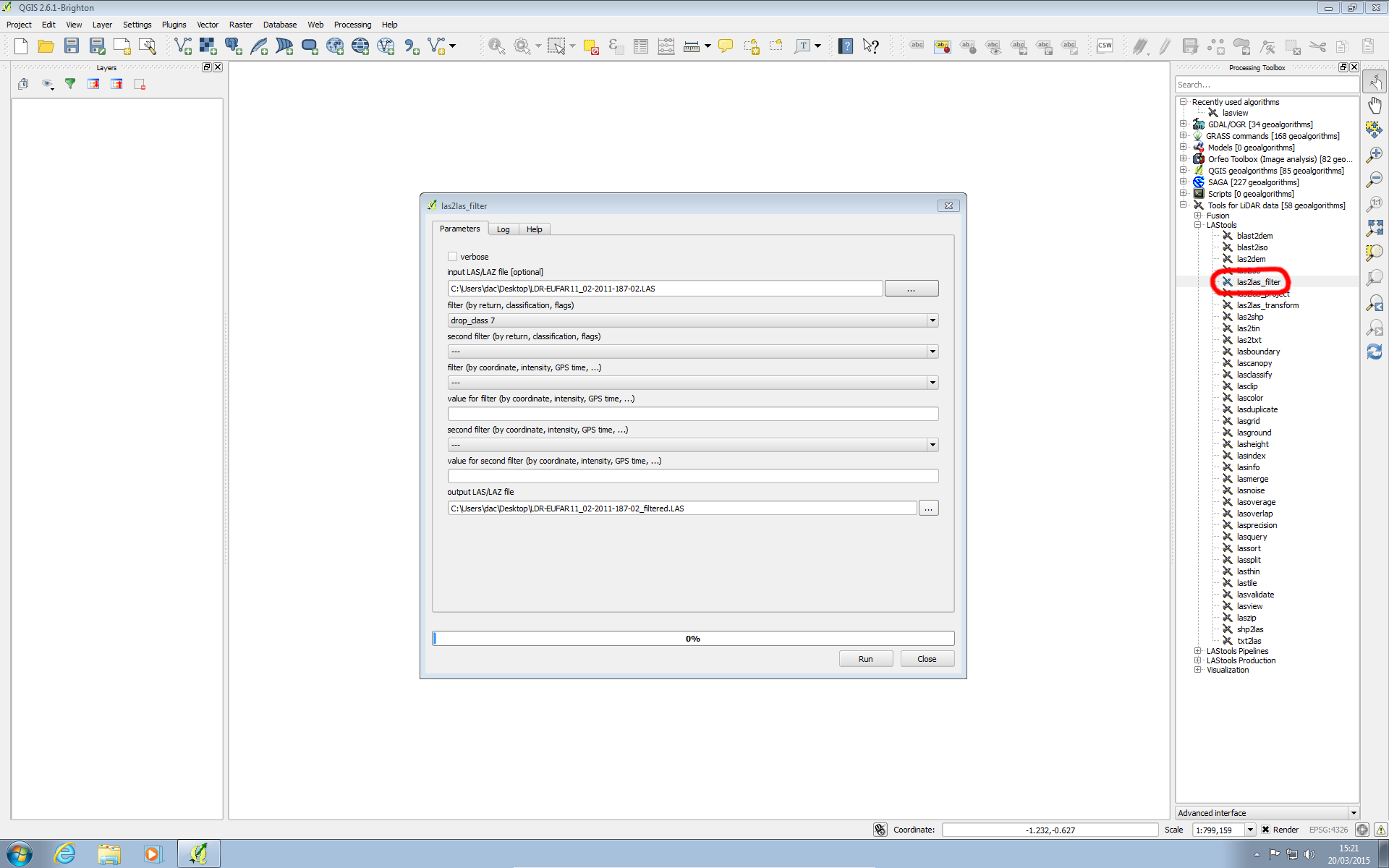
It is advised that these points be removed before using the data, unless they are of specific use to your studies. ARSF-DAN included a utility for removing these points from the ASCII files called 'pt_cloud_filter'. To remove them from LAS files it is suggested to download the LASTools package, specifically the las2las tool.
Removing noisy points from ASCII files
Removing noisy points from LAS files
Attachments (1)
- qgis_las2las_filter.png (158.2 KB) - added by dac 11 years ago.
{kind=link}
{kind=link}
Download all attachments as: .zip