| Version 4 (modified by mark1, 14 years ago) (diff) |
|---|
Instrument Boresighting
When fitted in the aircraft the remote sensing instruments do not have a prefect nadir pointing direction. Typically this will be off by a small amount (a fraction of degree) in 3 degrees of freedom. This angular offset needs to be calculated to get precise geocorrection and positioning on the ground. To show the importance of this, for example, if there is an error of 0.5 degrees in the view vector, at an altitude of 1000m this could lead to an error of about 10m at the swath edge.
Every time the instruments are placed in the aircraft a new boresight flight has to be undertaken over the calibration site. This may just be at the start of the flying season or multiple times throughout the year. At the end of the flying season a boresight flight is undertaken to check if any change has occurred.
Hyperspectral Boresight Procedure

Flight requirements:
- Multiple flight lines taken along different flight paths
- Opposite and overlapping: e.g. 1 line North and 1 line South
- Parallel and overlapping: e.g. 2 lines East
- A third direction: e.g. NorthEast
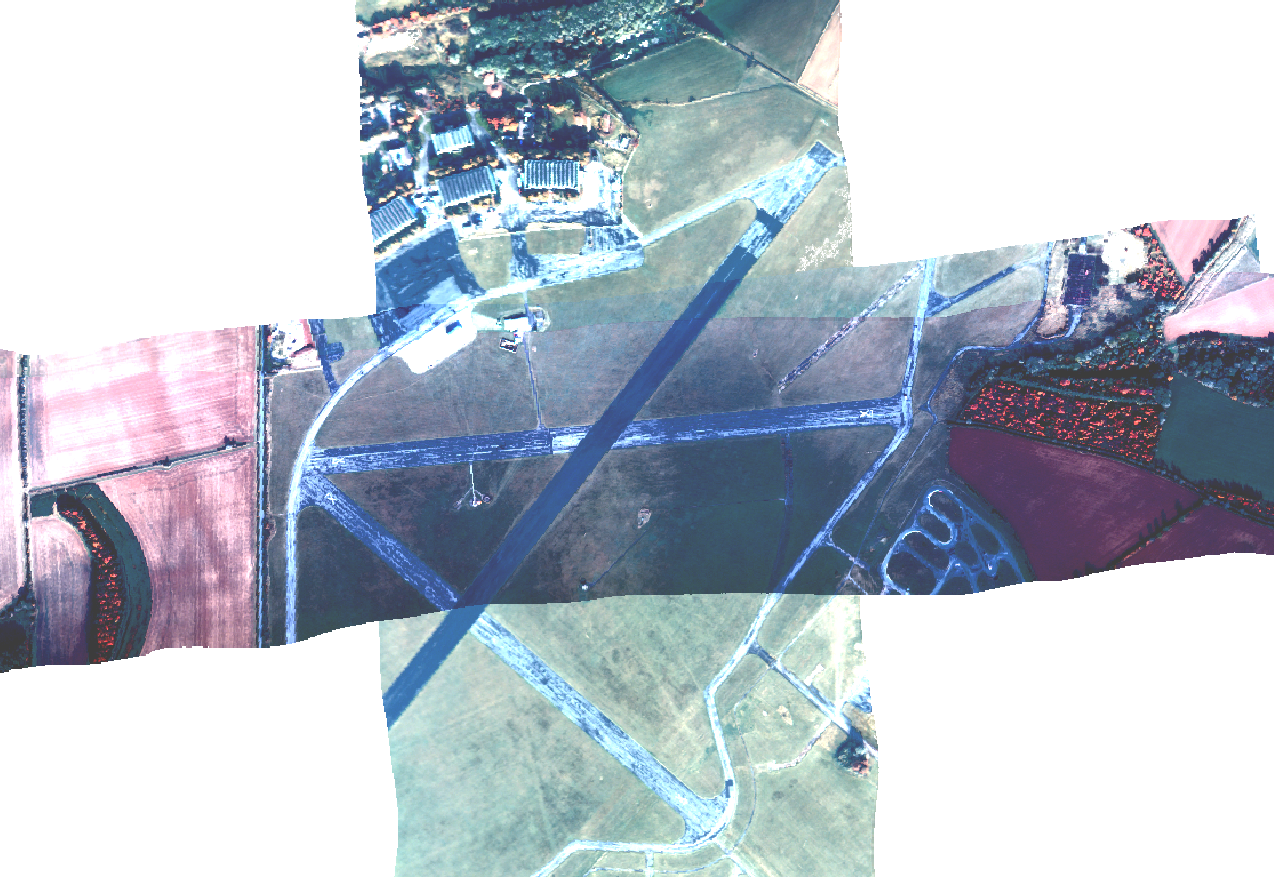
Typically we collect fully overlapping flight lines going along the compass directions: N, NE, E, SE, S, SW, W, NW
Processing technique:
The first stage of the processing is to remove possible timing offsets due to the navigation synchronisation problems. This is because an along track shift occurs as consequence of the timing error and needs to be resolved first.
When these timing offsets have been identified the boresight procedure can begin. This is currently a case of processing the data with different boresight values (given in roll, pitch and heading angular offsets) and finding a set which appears to minimise location errors for all the flight lines.
As a good starting point it is useful to use the opposite flight direction flight lines to solve for roll and pitch. As a roll error will manifest itself as an across track shift and a pitch error as an along track shift. Be wary though that heading errors will also appear as a mixture of across and along track shifts. Heading errors are best identified using parallel lines with a 50% along track overlap.
LiDAR Boresight Procedure
Flight requirements:
- Multiple flight lines taken along different flight paths at different altitudes
- Opposite and overlapping: e.g. a line North and a line South
- Parallel and overlapping: e.g. 2 lines East
- Ideally 4 or 5 lines each from at least 2 or 3 altitudes: 750m, 1350m, 2200m
Typically we will collect 11 or 12 lines going N, S, E and W taken at different altitudes.
Processing technique:
Attachments (1)
-
boresight_cross.png
(1.0 MB) -
added by mark1 14 years ago.
Boresight NSEW Cross lines
{kind=link}
Download all attachments as: .zip